| Este sitio web utiliza cookies para mejorar la experiencia de usuario y obtener datos estadísticos. Si continua navegando se considera que acepta nuestra política de cookies. |
| Este sitio web utiliza cookies para mejorar la experiencia de usuario y obtener datos estadísticos. Si continua navegando se considera que acepta nuestra política de cookies. |
| Modelado de un casco en 3D con Rhinoceros |
La forma más común de modelar un casco 3D es a partir del plano de formas. En construcción naval se aplica
el término plano de formas como un plano, a escala conveniente, de las líneas
de trazado horizontales o comúnmente conocidas como líneas de agua del buque en
planta; así como de las secciones verticales longitudinales y transversales.
Las secciones transversales igualmente espaciadas entre las perpendiculares de
proa y popa, constituye lo que se conoce como caja de cuadernas. Dependiendo de
la eslora del buque se cogerá un número u otro de cuadernas denominadas
cuadernas de trazado (más o menos de 10 a 20) además de dos secciones en los
puntos medios de los espacios finales tanto de proa como de popa, cuya causa en
la acentuación del cambio de las formas del buque en las secciones denominadas
anteriormente.
 Plano de formas de un pesquero pequeño.
Únicamente se dibuja, en el
plano de formas, la mitad del buque, debido a su simetría respecto a crujía,
por su parte, las secciones de la mitad de proa se dibujan a la derecha de la
proyección del plano de crujía y las de popa a la izquierda.
Una vez concluido el plano de
formas se precede a la realización de la cartilla de trazado el cual alberga
una serie de mediciones específicas del buque y consiste en las medias mangas a
diferentes alturas de las diferentes líneas de agua y alturas de cubierta en
cada una de las secciones transversales.
Las paralelas al plano de la
base se denominan líneas de agua, y también flotaciones. Se numeran de abajo
hacia arriba empezando por el plano de la base, al que se denomina línea de
base o línea de agua “0” cero.
Las paralelas a los planos de
los extremos de proa y popa, perpendiculares al plano de base, se denominan
secciones transversales, y también cuadernas. Se numeran generalmente de popa a
proa, empezando por la perpendicular de popa a la que le corresponde el “0”. De
la perpendicular de popa hacia popa se enumeran con números negativos.
Las paralelas a los planos de
los costados, de babor y estribor, que dividen al prisma longitudinal y
perpendicularmente al plano de la base, se denominan secciones longitudinales.
La principal es la que divide al prisma y al buque longitudinalmente en dos
partes simétricas, que generalmente se denomina plano diametral. Se designa línea
central a la intersección del plano diametral con el plano de la base, con los
de las líneas de agua, con los de las secciones transversales y con los de toda
estructura a la que divida en dos partes simétricas.
La obtención de unas formas
óptimas desde este punto de vista hidrodinámico es lo que se busca para que el
buque pueda navegar a una velocidad determinada utilizando la menor cantidad de
potencia posible y de esta forma gastar menos combustible y mejorar la
autonomía.
Entre los programas existentes
en la actualidad más apropiados para realizar el modelado 3D del casco están el
Maxsurf y el Rhinoceros, ambos trabajan creando superficies NURBS (acrónimo
inglés de non-uniform rational B-spline) es un modelo matemático muy utilizado para generar y representar
curvas y superficies
Una de las ventajas que aporta
el Rhinoceros 3D como modelador de cascos de buques, es su facilidad para
aprender a manejarlo, y que permite ajustar mucho más fácilmente la geometría
del casco a lo que nosotros queremos. También tiene herramientas para realizar
el alisado del casco (fairing) lo cual es indispensable para obtener un buen
modelo 3D y que pueda ser utilizado posteriormente en la fase de análisis
numérico.
Para la creación del plano de
formas utilizando Rhinoceros 3D se pueden utilizar diversas técnicas, siendo
una de las más sencillas la siguiente:

 


Una vez tengamos el modelo de
casco en 3D, nos facilitará la realización de diferentes análisis utilizando
software de arquitectura naval, CFD, etc, lo cual nos va a permitir comprobar
la validez del diseño o en caso necesario implementar mejoras, que llevarán a
la modificación del modelo 3D y a su vez la realización de nuevos análisis,
hasta comprobar que el diseño es el adecuado.
FORMACIÓN RECOMENDADA: - Curso de modelado 3D con Rhinoceros 5.0 para el sector naval |
| Publicado el 2016-04-11 11:42:11 por Carlos Rodríguez & Joshua | Abrir |
| MOTORES VELLINO |
| MOTORES VELLINO:
El Laboratorio Vellino Taller
Electromecánico fabricó motores en Barcelona desde aproximadamente 1904. La
fábrica la llevaba el ingeniero de origen suizo, Carlos Vellino Roch,
propietario también de una fábrica de acumuladores eléctricos en la misma
ciudad.
Motores fabricados por
LABORATORIO VELLINO: Taller electromecánico Aribau 197, Barcelona, España.

Son motores estacionarios de
gasolina, un cilindro tipo vertical, dos volantes, magneto “SAGA",
refrigeración líquida mediante enfriador tipo cortina con bomba de agua para
forzar la circulación de la misma.
  
Casualmente en 1942 los hermanos Sanglas,
luego fundadores de la marca de motocicletas de igual nombre, fabricaron en
Manlleu motores Vellino de uso agrícola
bajo licencia.  El mismo Carlos Vellino estuvo relacionado con los primeros pasos (1899) encaminados a construir los primeros vehículos en España con motor eléctrico. Más información en la biografía de Emilio de la Cuadra Albiol. 
Motor estacionario de gasolina,
un cilindro tipo vertical, un volante de inercia con apoyo exterior, taques y
válvulas a la vista de engrase exterior manual, magneto de baja tensión Bosch,
utilizando chispero en el encendido y no bujía, refrigeración líquida mediante
bidón de agua con efecto termo sifón.

En publicidad de época aseguran ser una marca acreditada durante más de 46 años, por lo
tanto podría deducirse que comenzaron la fabricación en el año 1904, en
Barcelona. Podría decirse que es una de las marcas pioneras en cuanto a la
fabricación de motores estacionarios en España, de construcción sencilla, el
engrase interior se realiza por chapoteo, y el de válvulas y taques
manualmente, un sencillo carburador y un regulador por inercia de los
contrapesos situados en la cabeza del árbol de levas, sirven para realizar la
admisión de la mezcla de combustible. Este sistema lo utilizaron desde estas
primeras unidades a comienzos de siglo hasta el final de la fabricación y
posterior cambio de denominación en los años 50. Usados habitualmente en bombas
de riego, generadores eléctricos, y máquinas agrícolas para trillar, instalaciones
de elvación de agua etc.
  VIDEOS: |
| Publicado el 2014-03-16 10:41:32 por | Abrir |
| Realizar animaciones con Blender 3D |
De todos es sabido que las animaciones aportan un toque de calidad a cualquier presentación, bien sea de un proyecto, producto, un servicio, o simplemente para promocionarse personalmente entre la dura competencia laboral. Tampoco es ningún secreto que realizar grandes animaciones supone dominar un programa informático y dedicarle muchas horas de trabajo, además de la necesidad de poseer conocimientos técnicos en una gran cantidad de campos, que dependerán de la naturaleza de la animación. Pero lo que mucha gente no sabe, es que con unos conocimientos básicos de Blender 3D, cualquier usuario con un poco de dedicación puede realizar animaciones sencillas que muestren a la perfección el modelo e incluso sus mecanismos. Para ello será necesario que domine un serie conceptos y procedimientos con los que Blender generará animaciones de calidad de forma sencilla. El primero de estos conceptos presentes en el programa, es el uso de fotogramas clave. Un fotograma clave no es más que una posición fija en el tiempo. Utilizando este recurso se puede decir a Blender que en el principio de una animación los elementos de la escena se encuentren en una determinada posición (fotograma clave en el fotograma 1), decirle que en el final de la animación los elementos se encuentren en otro punto (fotograma clave en el fotograma final), y Blender por su cuenta generará el movimiento necesario para se que produzca dicho cambio a lo largo del tiempo. Pongamos un ejemplo. Si le decimos a Blender que una pelota se encuentra a un lado de la pantalla en el principio de la animación, y le decimos que al final de la misma se encontrará en el otro lado de la pantalla, no habrá que hacer nada más para que la pelota recorra la pantalla de un lado a otro al lanzar la animación, porque Blender pensará por si mismo que la pelota ha tenido que ir desplazándose durante ese tiempo. 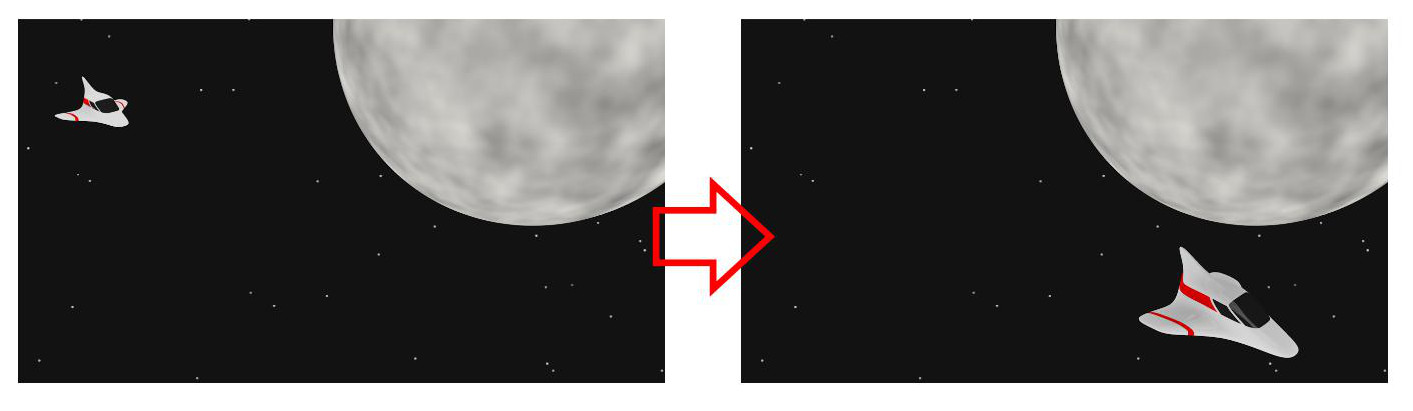 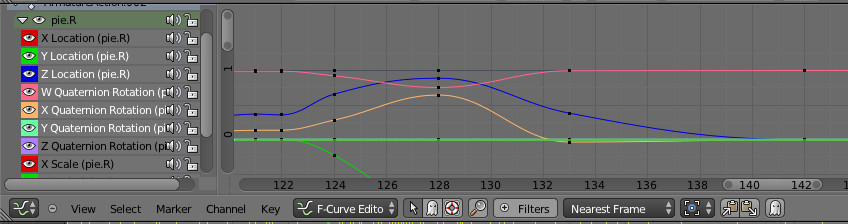 Pese a las grandes posibilidades del manejo de los fotogramas clave y la interpolación, en muchos casos se necesitará tener mayor control del recorrido de los objetos en la animación, por lo que Blender permite generar trayectorias con total comodidad a partir de curvas o simples segmentos. Con todo lo anteriormente dicho, ya se pueden realizar las primeras animaciones, pero con esto el usuario tendría serias dificultades para generar determinadas simulaciones de movimiento donde intervengan varias piezas u objetos, por lo que debe entrar en escena la cinemática directa y la mecánica restringida. Comprender bien estos conceptos permitirá poder hacer mejores animaciones con menor dificultad, ya que permitirá que el programa interprete que ciertos elementos de la escena afecten a otros con su movimiento (por ejemplo cuando un objeto se mueve y con su movimiento empuja a otro, o cuando en una máquina movemos una pieza y esta a su vez arrastra a otras). La cinemática directa además permitirá animar mecanismos e incluso personajes robóticos sin tener que entrar en la animación con huesos, o rigging, que supondría la necesidad de conocimientos más avanzados. 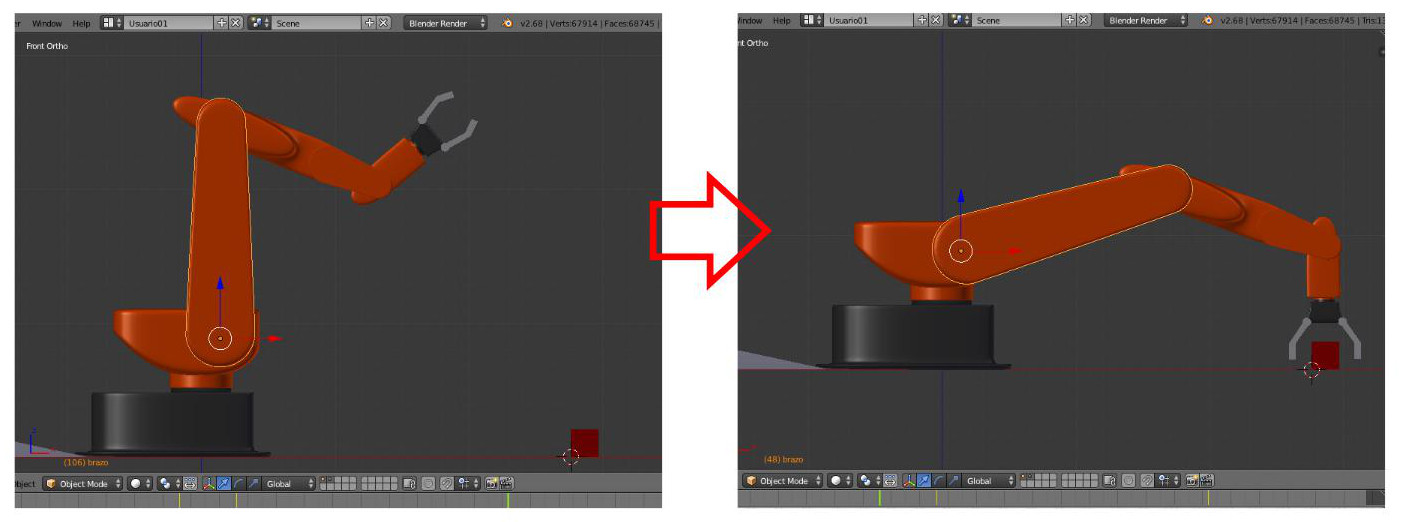  A esto debemos añadir que en Blender todo se puede animar. No solo se pueden animar los objetos modelados, sino que además se puede animar la cámara (pudiendo así utilizar con facilidad técnicas cinematográficas como el travelling), los focos (pudiendo simular el paso del día sobre un objeto al mover la fuente de luz), o incluso animar opciones (permitiendo generar cambios de color, cambios de material, cambios en la intensidad de las luces, golpes de zoom en la cámara, etc). Por último queda la guinda del pastel, y es que Blender dispone de un potente editor de vídeo, por lo que el usuario podrá montar vídeos utilizando varias animaciones e imágenes, e incluso añadir sonidos, permitiendo generar trabajos de gran calidad visual y realismo.  A continuación podemos ver el vídeo promocional del curso de Blender aplicado a Diseño de Producto que la plataforma Technical Courses oferta. Se trata de un vídeo realizado utilizando solo las técnicas mostradas en dicho curso, mostrando la capacidad de Blender combinados con los conocimientos que todo alumno del curso debe adquirir al finalizar. CURSOS RECOMENDADOS: - Curso de Blender 3D para Diseño de Producto. - Curso de Blender 3D. Modelado Básico. - Curso de Blender 3D. Iniciación a renderizado y animación. |
| Publicado el 2014-03-24 00:44:40 por Juan López Maroño | Abrir |
| Motores diesel lentos de 2T controlados electrónicamente. | ||||||||||||||||||||||
Los motores controlados
electrónicamente, motores llamados inteligentes se introdujeron en el mercado a
partir del año 2002-2003, con las versiones de control electrónico; MAN B&W
ME y Sulzer RT-flex, las cuales partían respectivamente de los modelos ya
establecidos MAN B&W MC y Sulzer RTA.

Tanto MAN B&W Diesel como New
Sulzer Diesel demostraron que el funcionamiento del motor sin árbol de levas
era posible, aplicando control electrónico en la inyección de combustible y en los
sistemas de actuación de la válvula de escape.
 Sulzer RT-Flex, animación.
La continua inversión en I+D dio
lugar a una generación de "motores inteligentes" muy fiables, los
cuales monitorizan su propia condición de funcionamiento y ajustan los
distintos parámetros de trabajo para obtener un rendimiento óptimo en todos los
regímenes de funcionamiento, incluida también la optimización del consumo de
combustible, así como distintos modos de reducción de las emisiones
contaminantes.

Los datos de funcionamiento del
motor son constantemente monitorizados y comparados con los valores definidos
por los expertos del sistema, si se detectan desviaciones entonces son
adoptadas de forma automática medidas correctoras para restablecer la situación
a valores normales.
 Sulzer RT-Flex engine.Foto: Wartsilla.
Para hacer frente al objetivo de
flexibilidad operativa, MAN B&W Diesel, explica que es necesario ser capaz
de cambiar los tiempos de la inyección de combustible y de los sistemas de
actuación de las válvulas de escape con el motor en marcha. Para lograr este
objetivo con el sistema tradicional de árbol de levas supondría una complejidad
mecánica que tendría un perjuicio para la fiabilidad del motor. Con un motor
sin el árbol de levas tradicional este inconveniente es solucionado. Otras
ventajas es que son capaces de monitorizar su propia condición y ajustar los
parámetros principales para optimizar el comportamiento en un modo de
funcionamiento seleccionado.

También pueden añadirse nuevas
características operacionales durante el tiempo de vida en servicio de un
buque, mediante la actualización del sistema software, que pretenden
incrementar el valor de reventa del buque.
Para satisfacer el objetivo de la
fiabilidad es necesario disponer de un sistema que pueda proteger de forma
activa el motor de daños causados por sobrecarga, la falta de mantenimiento y
un mal ajuste. La monitorización del motor permite recoger datos de su estado
de funcionamiento en tiempo real, esta información es procesada y analizada por
software, activando las medidas correctoras necesarias para salvaguardar la
seguridad del motor.
 Sección de Motor B&W 6S40ME-B9 (Foto MAN B&W, www.mandieselturbo.com) 
Una condición del sistema de
monitorización debe ser utilizada para evaluar el estado general del motor,
manteniendo así su funcionamiento y mantenimiento de sus parámetros de
funcionamiento dentro de los límites. La condición del sistema monitorización y
evaluación es un sistema on-line con muestreo automático de todos los datos de
funcionamiento normales del motor, complementados por las mediciones de presión
del cilindro. El sistema presentará un informe e intervendrá activamente cuando
los parámetros de funcionamiento muestren desviaciones insatisfactorias. Los
datos de presión del cilindro entregados por el sistema de medición se utilizan
para diversos cálculos:
- La presión media indicada es
determinada como un chequeo de la distribución de cargas en el cilindro, así
como la potencia total del motor.
- La presión de compresión se
determina como un indicador de fugas excesivas causados por, por ejemplo, una
válvula de escape quemada o rotura de aros de pistón (la condición es generalmente
acompañada por un aumento en la temperatura de los gases de escape del cilindro
en cuestión).
- La temperatura de la pared del
cilindro es monitorizada como un indicador adicional del estado de los aros del
pistón.
- La presión de combustión se
determina para controlar los tiempos de la inyección y para el control de las
cargas mecánicas.
- La tasa de aumento de presión
(dP/dt) y la tasa de liberación de calor son determinados para la evaluación de
la calidad de combustión como una advertencia en caso de "malos
combustibles" y para indicar cualquier riesgo de problemas en los aros de
pistón en caso de altos valores dP/dt.
 Motor B&W 6S40ME-B9, análisis FEM de temperaturas en cámara de combustión y pistón (Foto MAN B&W, www.mandieselturbo.com)  Monitorización completa en tiempo real de todos los parámetros de funcionamiento, consumos de combustible, emisiones contaminantes y la gestión enérgética en tiempo real. El sistema de monitorización de
la condición del cilindro tiene por objeto detectar fallas tales como fugas en
los aros de pistón, ralladuras en la camisa interior del cilindro y combustión
anormal. La detección de anomalías graves por los sistemas integrados da lugar
a un cambio en el modo de funcionamiento del motor, pasaría a funcionar en “modo
de protección del motor”. El sistema de control contiene los datos para un
funcionamiento óptimo en una serie de modos diferentes, como "modo de
ahorro de energía”, “modo de control de emisiones” y diversos modos de
protección del motor. El limitador de carga del sistema (sistema de cumplimiento
del diagrama de carga) tiene por objeto prevenir cualquier sobrecarga del motor
en condiciones tales como mar gruesa, casco sucio, navegación en aguas poco
profundas, hélice demasiado pesada o potencia excesiva absorbida por el
alternador de cola. Estas funciones aparecerán como algo normal en las futuras
especificaciones técnicas de compra.

El sistema de inyección de
combustible funciona sin árbol de levas convencional, utilizando alta presión
de aceite hidráulico impulsado por una bomba como fuente de potencia y un servo
con control electrónico para controlar la bomba de inyección. Los aspectos
positivos del sistema electrónico incluyen una considerable mejora del
rendimiento de la combustión, de la eficiencia y, por tanto, de las emisiones contaminantes.

Otra ventaja de los motores con control electrónico, es posible reducir de manera apreciable la velocidad de funcionamiento
lento del motor, que tiene ventajas cuando el buque maniobra en aguas
congestionadas, como por ejemplo el Canal de Suez. Por otra parte, la mayor
utilización de sensores en los motores abre nuevas posibilidades de tareas
adicionales, tales como la monitorización de la condición y la detección
temprana de un posible daño. Para estos propósitos hay disponibles muchos más
puntos de medida de los que había anteriormente.
 Portacontenedores Maerks Columbine navegando frente a las costas gallegas en Septiembre de 2010.
Tanto Wärtsilä como MAN B&W
pretenden una flexibilidad operacional sin precedentes en términos de ahorro de
combustible y optimización de las emisiones, una mejora de la fiabilidad y la
maniobrabilidad (gracias a modos de velocidad de funcionamiento extremadamente
lenta), y costes de funcionamiento más bajos durante el ciclo de vida. También
facilitan una operación más sencilla y sin problemas por la tripulación.

La necesidad de los análisis CAE y CFD:
Todas las ventajas que proporciona la gestión electrónica del motor se
encuentran limitadas por la física de los elementos mecánicos que
costituyen el propio motor, la capacidad de consumo de aire,
combustible, eficiencia del barrido, capacidad para quemar diferentes
combustibles, temperaturas admisibles en la cámara de combustión,
potencia máxima que puede desarrollar la estructura motor, capacidades
de la turbosoplante etc. Todos estos parámetros se encuentran
determinados por la arquitectura del propio motor, para optimizar el
diseño de un motor antes de contruirlo contamos con las herramientas
CAD, CAE y el CFD, que nos van a permitir construir de forma virtual y
simular su comportamiento, el ahorro de costes en tiempo y dinero es
incomparable, además de que es posible desarrollar y evolucionar mucho
más un determinado diseño.

Los motores de dos tiempos en general presentan un inconveniente que
tiene una gran influencia en el desarrollo de su ciclo de
funcionamiento, este problema viene motivado por el hecho de tener que
realizar las cuatro fases del ciclo de funcionamiento (expansión,
escape, admisión y compresión) en una sola vuelta del cigüeñal, por
tanto los periodos necesarios para cada una de las fases son
necesariamente más cortos que en un motor de cuatro tiempos. De todas
ellas, las etapas más críticas son el escape-admisión, que es cuando se
renueva la carga dentro del cilindro, es por ello que en el diseño del
motor es sumamente importante que dichas etapas se lleven a cabo de
forma óptima, para que el motor pueda desarrollar buenas prestaciones.  Diagrama presión-volumen de un motor de dos tiempos
El proceso de desplazamiento de los gases quemados fuera del cilindro, y
el llenado con carga de aire fresco, recibe el nombre de “barrido”, y
su adecuada realización tiene una influencia decisiva no solo en el
consumo de combustible, sino también en la potencia y en la
contaminación. En la siguiente figura se indica la circulación de aire
(color rojo) y gases de escape (color azul).  Esquema de barrido y renovación de la carga del motor MAN S50MC
Tal y como se puede observar en la figura anterior, el aire entrante se
utiliza para expulsar fuera o barrer los gases de escape y mientras
tanto llenar el espacio con aire fresco. Durante el proceso, una
cantidad de aire externo es usado para limpiar el cilindro de gases de
combustión. El aire entrante a presión dentro del cilindro se llama aire
de barrido, y las lumbreras a través de los que entrase son llamadas
lumbreras de admisión o de barrido. El barrido de los motores de dos
tiempos se caracteriza por dos problemas típicos: las pérdidas por
short-circuit y mixing. Short-circuit (cortocircuito) consiste en
expulsar parte de la carga de aire fresco directamente al escape y
Mixing (mezcla) consiste en que hay una pequeña cantidad de gases
residuales que permanecen atrapados sin ser expulsados, los cuales se
mezclan con parte de la carga de aire fresco. A fin de reducir estos
problemas, el aire de barrido que entra dentro del cilindro a partir de
las lumbreras de admisión debe estar perfectamente dirigido. La
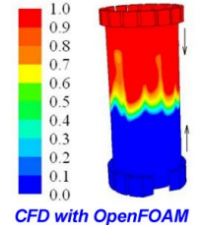
siguiente figura, obtenida mediante un análisis CFD, muestra la
distribución de velocidades del flujo en el interior del cilindro
durante la renovación de la carga.  Distribución de velocidades del flujo durante el barrido. Imagen obtenida con OpenFOAM.  Lumbreras de barrido del motor MAN B&W S50MC El motor MAN B&W 7S50MC cuenta
con 7 cilindros en línea, con un diámetro de cilindro de 500 mm y una
carrera de 1910 mm, suma una cilindrada total de 375 litros y desarrolla
una potencia máxima de 9.988 kW a 127 rpm. Cada cilindro posee en su
parte baja 16 lumbreras de admisión y en la culata posee una gran
válvula de escape para permitir la exhaustación de los gases quemados.
Por medio del análisis CFD proporciona información completa sobre el
fenómeno en el interior del cilindro y la influencia de multitud de
factores. En el campo de los motores marinos medianas y grandes, el
análisis CFD es especialmente útil porque un prototipo experimental es
extremadamente costoso y la construcción de un modelo a escala a veces
no es suficientemente preciso.
La siguiente figura muestra las fracciones másicas de gases de escape (color azul) y aire (color rojo) para un recorrido desde 90º hasta 270º de ángulo de cigüeñal.  Evolución de las fracciones másicas de aire y gases durante el barrido, análisis CFD realizado con OpenFOAM
Para llevar a cabo el estudio CFD de un motor es necesario disponer del
sowftware libre OpenFOAM porque al ser un código abierto permite una
completa manipulación de las ecuaciones gobernantes. Lo cual es
indispensable para llevar a cabo este tipo de análisis de un motor real
por ser necesario ajustar multitud de parámetros que definen de forma
precisa el funcionamiento del motor, lo cual además sería muy complicado
de llevar a cabo con otro tipo de programas comerciales.
Si desea recibir un curso de formación para aprender a manejar el programa de CFD de uso libre OpenFOAM, le recomendamos que realice el curso de Technical Courses: - WOODYARD (Pounder's Marine Diesel Engines And Gas Turbines, 9Th Edition). - WARTSILLA (http://www.wartsila.com/en/marine-solutions/overview) |
||||||||||||||||||||||
| Publicado el 2014-04-02 11:58:35 por C. Rodriguez Vidal | Abrir | ||||||||||||||||||||||
| Motor diesel de cuatro tiempos más potente del mundo, el Wärtsilä 64 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
El Wärtsilä 64 es el motor de media velocidad más potente del
mundo. Desarrolla una potencia de alrededor de 2.000 Kw por cilindro. La
versión más potente es el modelo 18V64 que cuenta con 18 cilindros en V
y desarrolla una potencia de 34.920 kW.
El motor de 6 cilindros es la versión más pequeña de la serie, que solamente cuenta con una potencia de 16.400 BHP. En este rango de potencias lo más habitual es emplear motores de dos tiempos de cruceta, que giran más lentamente y van directamente acoplados al propulsor sin necesidad de engranajes reductores de velocidad. En la tabla siguiente podemos comparar las características del Wärtsilä 6L64 con un motor diesel lento con potencia equivalente, el SULZER RT-flex 58T.
Ambos motores son adecuados para este tipo de buques, las diferencias
más importantes entre ambos son el peso y tamaño que son bastante más
favorables para el Wärtsilä 6L64, como se puede observar en el dato de
densidad de potencia la mejora es de un 43%, sin embargo esta ventaja se
ve ligeramente disminuida por la necesidad de equipar una reductora
entre motor y hélice.
En cuanto a consumos de combustible, están bastante igualados pero con
una ligera ventaja para el motor de dos tiempos Sulzer, que en la
práctica es mayor debido a que va directamente acoplado, mientras que el
de cuatro tiempos necesita una reductora que supone pérdidas de
rendimiento en la transmisión de potencia a la hélice. En cuanto a la
calidad de combustible ambos están preparados para quemar Heavy fuel oil
730 cSt/50°C, ISO 8217, class F, RMH 55. Aunque es previsible que a la
larga el uso de este tipo de combustibles pesados causen mayores costes
de mantenimiento en el motor de cuatro tiempos, siendo más fiables en
este sentido los motores de dos tiempos.
En cuanto al los costes, es de esperar que el motor lento Sulzer tenga
un coste sensiblemente superior al del motor Wärtsilä 6L64 incluyendo el
coste de la reductora.
Resumiendo, el motor de media velocidad Wärtsilä 6L64 es una alternativa
válida a los motores de dos tiempos de cruceta que son más habituales
en este rango de potencias. Supone ventajas claras en tamaño y peso que
pueden ser eficazmente aprovechadas en cierto tipo de buques con
características o diseño que se aparten en cierta manera de lo
convencional.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Publicado el 2014-02-15 16:28:21 por C. Rodriguez | Abrir | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Entradas 31 a 35 de 59 | << Anterior | Siguiente >> |
 |